

 QQ
QQ
工博士专业集成安川焊接机器人|ABB焊接机器人|库卡焊接机器人|发那科焊接机器人|OTC焊接机器人|焊接机器人工作站|焊接机器人自动化服务|焊接设备|焊接机|焊接自动化|焊接自动化设备|管线包等。
ABB机器人常用型号:
ABB-IRB 120-3/0.58,ABB-IRB 1200-7/0.7,ABB-IRB 1200-5/0.9,ABB-IRB 1600-10/1.45,ABB-IRB 2600-20/1.65,ABB-IRB 4600-40/2.55,ABB-IRB 4600-60/2.05,ABB-IRB 6700-150/3.2,ABB-IRB 6700-200/2.6,ABB-IRB 1410-5/1.45,ABB-IRB 460/110/2.4,ABB-IRB 660-180/3.15,ABB-IRB 660-250/3.15,ABB-IRB 52,ABB-IRB 550,ABB-IRB 910,ABB-IRB360等。
本公司是ABB机器人代理,具体供应的服务范围有:
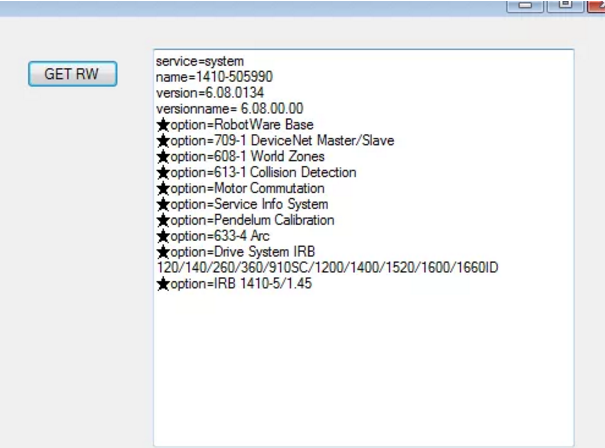
1. webservice为ABB机器人提供的基于web的接口
2. 可以通过编写html等语言,直接访问对应链接获取信息,例如以上效果可以在浏览器直接输入127.0.01/rw/system得到结果。
3. 此处举例在C#创建客户端,获取上述结果。
4. webservice返回的结果通常为XML格式,部分返回结果支持json格式(具体参考手册)。
5. 在c#中创建button及相关textbox控件
6. 为加入相关json等引用,点击工具中的NuGet程序包管理器-程序包管理器控制台,并在控制台安装以下内容:
PM>Install-Package Microsoft.AspNet.WebApi.Client -Version 5.1.2
PM> Install-Package System.Json -Version 4.0.20126.16343

7. c#代码中添加如下引用
using System.Net;
using System.Net.Http;
using System.Json;
8. 在相关button中添加代码如下:
string url = "http://127.0.0.1/rw/system?json=1";
string username = "Default User";
string password = "robotics";
HttpWebRequest request = (HttpWebRequest)WebRequest.Create(url);
request.Method = "GET";
request.Credentials = new NetworkCredential(username, password);
request.CookieContainer = _cookies;
request.PreAuthenticate = true;
request.Proxy = null;
request.Timeout = 60;
request.ServicePoint.Expect100Continue = false;
WebResponse response = request.GetResponse();
if (response != null)
{
using (StreamReader reader = new StreamReader(response.GetResponseStream()))
{
string result = reader.ReadToEnd();
dynamic obj = Newtonsoft.Json.JsonConvert.DeserializeObject(result);
显示控制器名字,版本号等
var service = obj._embedded._state[0]; // the first item in the json state response is the system name, robotware version and robotware version name
textBox7.Text = "service=" + service._title + "\r\n";
textBox7.Text = textBox7.Text + "name=" + service.name + "\r\n";
textBox7.Text = textBox7.Text + "version=" + service.rwversion + "\r\n";
textBox7.Text = textBox7.Text + "versionname= " + service.rwversionname + "\r\n";
// 显示机器人选项
foreach (var option in obj._embedded._state[1].options) // the second state item is an array of installed options
{
textBox7.Text = textBox7.Text + "★option=" + option.option + "\r\n";
}
}
}
通过PCSDK获取ABB机器人WebService端口
-
1.ABB机器人支持WebService,如果不懂的话可以拉到底下部分先看:二次开发之安装pcsdk及加载dll
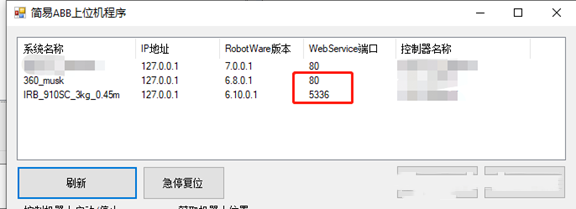
2. 默认的WebService端口是80,但是如果在PC上运行两个模拟或其他设置,默认的80端口可能被占用。如何获取当前机器人系统的WebService端口?
3.你可以使用PCSDK。参见Pcsdk的安装和使用。
4. 查阅PCSDK手册,ControllerInfo的属性中有WebServicePort端口端口参数,所以可以通过该参数获得。

5. 可以创建代码如下:
if(scanner==null)
{
scanner= newNetworkScanner();
}
scanner.Scan();
this.listView1.Items.Clear();
ControllerInfoCollection controls = scanner.Controllers;
foreach(ControllerInfoinfo incontrols)
{
ListViewItem item = new ListViewItem(info.SystemName);
item.SubItems.Add(info.IPAddress.ToString());
item.SubItems.Add(info.Version.ToString());
item.SubItems.Add(info.WebServicesPort.ToString());
!显示WebService端口号
item.SubItems.Add(info.ControllerName);
item.Tag= info;
this.listView1.Items.Add(item);
}
二次开发之安装pcsdk及加载dll
2) 可以从以下网站下载新pcsdk
3) 下载完毕后,双击exe进行安装。
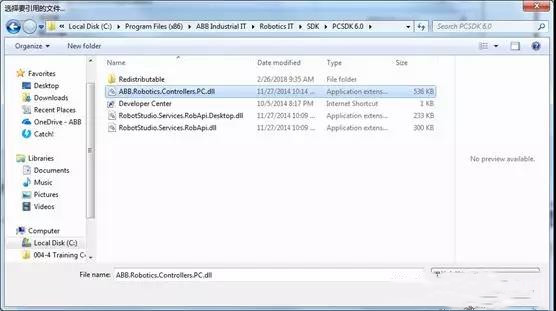
4) 安装完的默认目录为如下:
C:\Program Files (x86)\ABBIndustrial IT\Robotics IT\SDK\PCSDK 6.0
5) 打开visualstudio,新建一个项目(此处举例C#)
6) 在解决方案资源管理器中,右击引用,添加引用
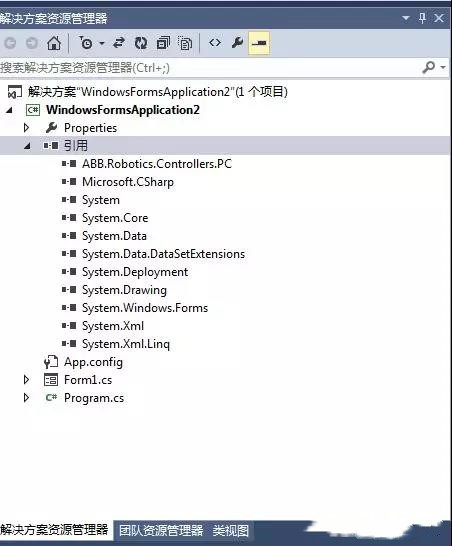
7) 浏览,找到pcsdk的安装位置,如上所述,添加ABB.RoboticsControllers.PC.dll
8) 添加后,即可方便的在c#里做针对机器人的二次开发
9) 程序内,添加下列引用
10) 
以上内容转载于网络
更多:ABB机器人
