

 QQ
QQ
本公司可供应焊接机器人,具体供应的服务范围有:
工博士专业集成安川焊接机器人|ABB焊接机器人|库卡焊接机器人|发那科焊接机器人|OTC焊接机器人|焊接机器人工作站|焊接机器人自动化服务|焊接设备|焊接机|焊接自动化|焊接自动化设备|管线包等。
ABB机器人常用型号:
ABB-IRB 120-3/0.58,ABB-IRB 1200-7/0.7,ABB-IRB 1200-5/0.9,ABB-IRB 1600-10/1.45,ABB-IRB 2600-20/1.65,ABB-IRB 4600-40/2.55,ABB-IRB 4600-60/2.05,ABB-IRB 6700-150/3.2,ABB-IRB 6700-200/2.6,ABB-IRB 1410-5/1.45,ABB-IRB 460/110/2.4,ABB-IRB 660-180/3.15,ABB-IRB 660-250/3.15,ABB-IRB 52,ABB-IRB 550,ABB-IRB 910,ABB-IRB360等。
本公司是ABB机器人代理,具体供应的服务范围有:
ABB机器人,ABB工业机器人,ABB机械臂,ABB机器人自动化项目,ABB机器人配件,ABB机器人备件,ABB机器人示教器,ABB机器人控制柜,ABB机器人线缆,ABB机器人维保,ABB机器人售后服务,ABB机器人技术支持,管线包等。 
注:下载完Robotstudio后,对应robotware需要在安装完robotstudio后,在robotstudio的addin里单独下载
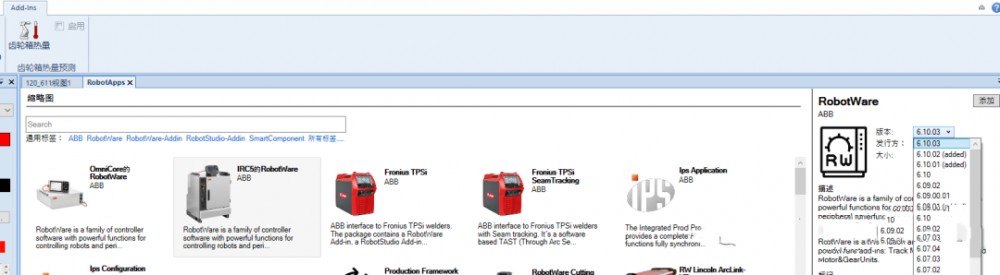
Robotstudio2020对于机器人轨迹仿真,新增急停位置和轨迹显示,如下图。
在ABB机器人的实际操作过程中,如果触发了紧急停止,机器人会在紧急情况下停止,然后机器人会偏离轨迹。如果在设计之初就考虑到这些轨迹的偏差,那么相应的安全风险就会大大降低。
如何使用它:点击“TCP跟踪”下的“Put”检查“显示停止位置类别0”在左边。
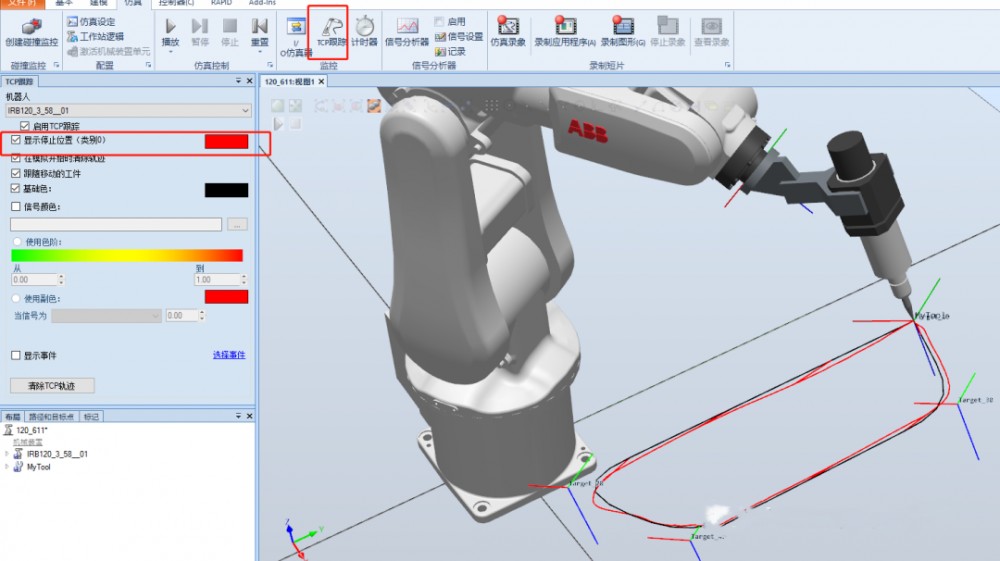
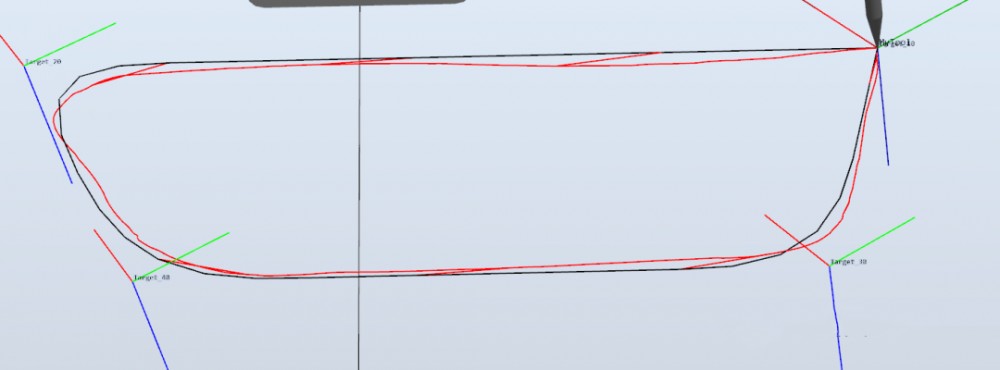
例如上图中,黑色为实际轨迹,红色为机器人在相应位置触发紧急停止时可能停止的位置。由于高速(V1000)和较大的转弯半径(Z300),实际的紧急停车位置会更加偏离机器人的轨迹。
机器人运行代码如下。
PROC Path_10()
MoveL Target_10,v1000,z100,MyToolWObj:=wobj0;
MoveL Target_20,v1000,z100,MyToolWObj:=wobj0;
MoveL Target_40,v1000,z100,MyToolWObj:=wobj0;
MoveLTarget_30,v1000,z100,MyToolWObj:=wobj0;
MoveL Target_10,v1000,z100,MyToolWObj:=wobj0;
ENDPROC
转载于:机器人在线
更多:ABB机器人
