

 QQ
QQ
工博士专业集成安川焊接机器人|ABB焊接机器人|库卡焊接机器人|发那科焊接机器人|OTC焊接机器人|焊接机器人工作站|焊接机器人自动化服务|焊接设备|焊接机|焊接自动化|焊接自动化设备|管线包等。
ABB机器人常用型号:
ABB-IRB 120-3/0.58,ABB-IRB 1200-7/0.7,ABB-IRB 1200-5/0.9,ABB-IRB 1600-10/1.45,ABB-IRB 2600-20/1.65,ABB-IRB 4600-40/2.55,ABB-IRB 4600-60/2.05,ABB-IRB 6700-150/3.2,ABB-IRB 6700-200/2.6,ABB-IRB 1410-5/1.45,ABB-IRB 460/110/2.4,ABB-IRB 660-180/3.15,ABB-IRB 660-250/3.15,ABB-IRB 52,ABB-IRB 550,ABB-IRB 910,ABB-IRB360等。
本公司是ABB机器人代理,具体供应的服务范围有:
ABB机器人,ABB工业机器人,ABB机械臂,ABB机器人自动化项目,ABB机器人配件,ABB机器人备件,ABB机器人示教器,ABB机器人控制柜,ABB机器人线缆,ABB机器人维保,ABB机器人售后服务,ABB机器人技术支持,管线包等。 一、ABB机器人外轴控制参数调整的基本步骤
L完成外轴的硬件安装,如电机安装、SMB箱安装等;
L将外轴临时参数文件装入机器人控制器;
L修改并配置临时加载参数,确保机器人此时能够控制电机的旋转;
L如果客户需要对电机进行额外的设置,如转弯、启用和控制,则需要进行额外的配置和设置;
等所有参数设置完成后,启动电机参数调整。
二、配置外轴参数
2.1加载参数
2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:
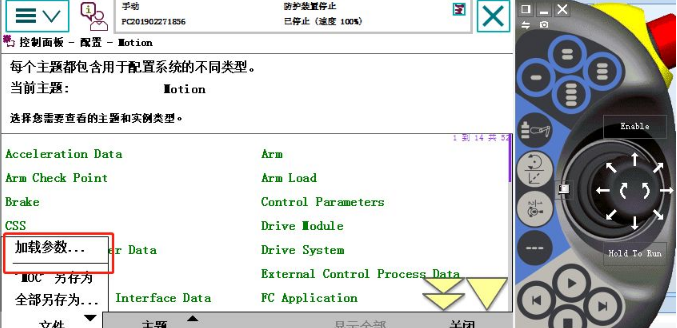
2.1.2 选择:Load parameters if noduplicates 然后选择如下路径加载参数:C:\ProgramData\ABB Industrial IT\Robotics IT\DistributionPackages\ABB.RobotWare-6.08.0134\RobotPackages\RobotWare_RPK_6.08.0134\utility\AdditionalAxis\General\DM1,然后选择相应的文件加载;
2.1.3重启系统。
2.2 配置参数
2.2.1在Motion中选择MechanicalUnit并且定义如下参数
l Name
l Activateat Start Up 开机是否自动激活
l DeactivationForbidden 是否允许禁用该轴
l UseSingle 1
2.2.2在Motion中选择Single定义Single;
l Name
l Single
2.2.3在Motion中选择SingleType定义外轴的种类;
有以下几种选项可以选择:
TRACK; FREE_ROT; EXT_POS; TOOL_ROT;
2.2.4在Motion中选择Joints,为外轴指定外轴的序号;
如:第10个轴对应与robtarget中的eax_d
2.2.5在Motion中选择Arm,定义外轴的运动范围;
l UpperJoint Bound;
l LowerJoint Bound;
2.2.6在Motion中选择AccelerarionData,定义外轴加速和减速运动参数;
l NominalAcceleration;
l NominalDeceleation;
2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)
l TransmissionGear Ratio;减速比设置
l RotatingMove 若是旋转轴,为yes;为直线导轨轴,则No
l TransmissionHigh Gear 只有在独立轴时才需要设置
l TransmissionLow Gear 只有在独立轴时才需要设置
2.2.8在Motion中选择MotorType,定义下面的参数;(这些参数有电机供应厂商提供)
l Poleparis
l KePhase to phase (Vs/Rad)
l Maxcurrent (A)
l Phaseresistance(ohm)
l Phaseinductance(H)
2.2.9在Motion中选择MotorCalibration,定义下面的参数;
l Calibrationoffset;通过Fine calibration获得;
l Commutatoroffset:电机供应商提供;
2.2.10 在Motion中选择StressDuty Cycle,定义扭矩和转速;
l TorqueAbsolute Max;
l SpeedAbsolute Max;
Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:
Torque Absolute Max < 1.732 × Ke Phase to Phase× Max Current;
通过计算出的值适当的减小(5~10);
2.2.11 重启系统;
三、参数调整
3.1. 检测电机的连接正确性
主要验证以下几项功能:
l 寻找同步永磁电机的Commutation的值;
l 检查电机的相序是否正确;
l 检查电机的电机对是否设置正确;
l 检查Resolver的连接是否良好。
3.1.1在Motion中选择Drivesystem,将Current_vector_on设置为TRUE,然后重新启动系统,并且运行程序Commutation;
Debug → Call Service Routine →Commutation。
3.1.2检查电机的相序连接是否正确;通过示校器控制电机的相正方向旋转,从安装杆看相电机,如果旋转方想为顺时针方向,则电机的相序连接正确,如下图所示:
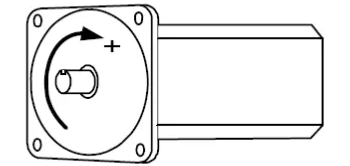
如果电机旋转方向不正确,则可以通过改变接线相序来纠正。
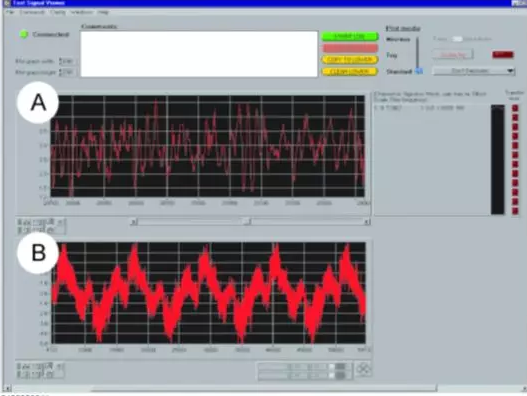
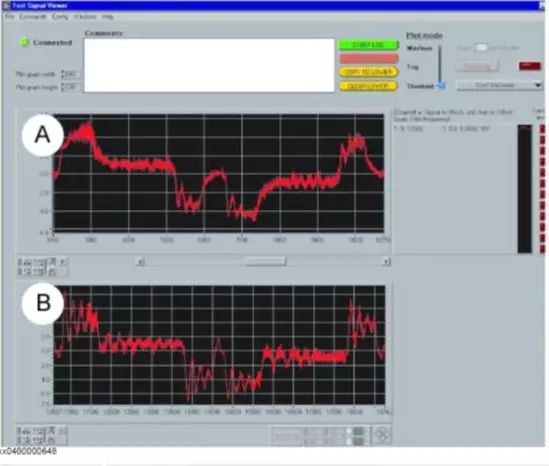
3.3.按照下图设置Test signal Viewer软件

设置:speed 和torque_ref
注意:具体的Test signal Viewer操作参看手册ABBTest Signal Viewer.pdf;
3.4.初步调整Kv,Kp,Ti;
3.4.1 调整Kv(方法一)
l 将Lag control master 0 中的参数 FFW Mode 设置为No;
l 将Kp设置为3(记录Kp的初始值);将Ti设置为10(记录Ti的初始值),重启系统让新的参数生效;
l 按以下步骤逐步提高Kv值10%在测试信号查看器中查看Torque_ref信号。当电机不稳定,即电机有明显振动和声音时,停止程序。
通过Test signal Viewer可以十分清楚的看见电机的不稳定的状况:
l 记录此时Kv的值(程序中的Kv为系数,即实际Kv为系数与程序中Kv相乘的初值),将Kv/2.5的值输入系统参数,重新启动系统。
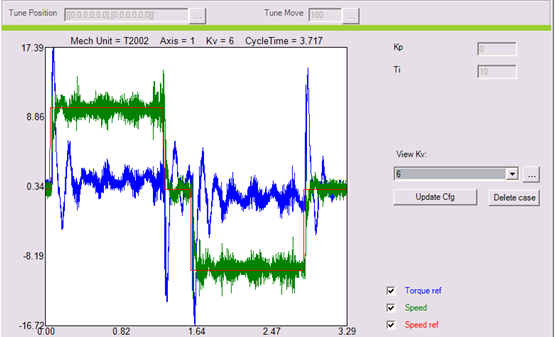
调整Kv方法二:
使用Tune Master使用ABB提供的标准外轴调整软件来调整参数,如下图所示。当电机转速出现明显抖动时,则将Kv值除以2.5
3.4.2 调整Kp(方法一)
l 保持刚调整玩的Kv值不变,将Kp值改回到原来的初始值,依然保证Ti为10;
l 逐渐将Kp值增加10%,并在测试信号查看器中观察Torque_ref信号,直到在测试信号查看器中看到一个超调。
l 将Kp减1,即Kp=Kp-1,将所得的值输入到系统中,重启系统;
调整Kp(方法二)
采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示:
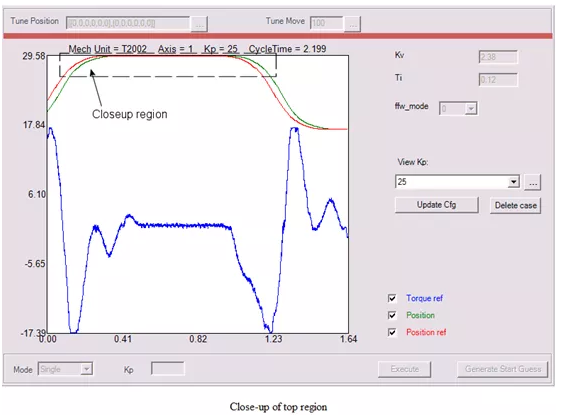
确保绿线尽可能地接近红线,但不要超过红线。若无明显超调,见矩曲线(蓝线所示)。如果蓝线上有一个明显的振荡曲线,这意味着现在的参数是合适的。
两种上诉方法的区别:
***种方法精度高,调试效率低。第二种方法精度低,调试效率高。通常情况下,Kp值越高,电机的定位精度越高。但是当它太大的时候,很容易引起电机的振动,这会对电机造成很大的损坏。对于大负荷的定位器,Kp通常为20左右,对于小负荷的定位器,Kp通常为35左右。
3.4.3 调整Ti(方法一)
l 保持刚调整完毕的Kv和Kp值不变,将Ti设置为1;
l 将Ti的值按10%的步长递减,观察Test signal viewer的Torque-ref,直到见到overshot为止。
MODULE ti_tune
PROC main()
VAR num i;
VAR num per_Ti;
VAR num Ti;
TuneReset;
FOR i FROM 0 TO 10 DO
per_Ti:=100-10*i;
Ti:=1*per_Ti/100;
TPErase;
TPWrite "per_Ti = "\Num:=per_Ti;
TPWrite "Ti = "\Num:=Ti;
TuneServo STN1,1,200\Type:=TUNE_KV;
TuneServo STN1,1,250\Type:=TUNE_KP;
TuneServo STN1,1,per_Ti\Type:=TUNE_TI;
MoveJ p1,v1000,z50,tool0;
MoveJ p2,v500,z50,tool0;
MoveJ p1,v1000,z50,tool0;
WaitTime 1;
ENDFOR
ENDPROC
ENDMODULE
l 记录此时的Ti值,将Ti值增加5~10%,即Ti=Ti(1+5%),将此值输入到系统中,重新启动系统;
调整Ti方法二:
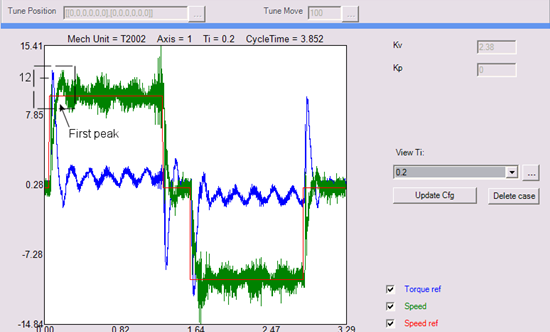
Ti值通常为越小变位机速度响应越快,但是越小越容易造成电机抖动,Ti通常为0.1.
转载于:机器人在线
更多:ABB机器人
- 下一篇:ABB码垛机器人应用现场
- 上一篇:ABB机器人新工厂将采用近乎无限的定制化解决方案
